自衡被控對(duì)象可以用三個(gè)參數(shù)描述:穩(wěn)態(tài)系數(shù)增益K、動(dòng)態(tài)系數(shù)時(shí)間常數(shù)T和純滯后時(shí)間τ。Lambda整定方法使用下面的公式確定自衡對(duì)象的PID參數(shù):
式中,λ為期望的閉環(huán)時(shí)間常數(shù)。
公式
和公式 的形式一致,只是把調(diào)節(jié)閉環(huán)性能的參數(shù)從τ變成了λ。實(shí)際上λ反映了控制回路的期望閉環(huán)時(shí)間常數(shù)。λ越大控制回路的閉環(huán)響應(yīng)速度越慢,λ越小控制回路的閉環(huán)響應(yīng)速度越快。對(duì)基準(zhǔn)自衡對(duì)象使用λ=0/τ/2=τ0s/3s/6s,對(duì)應(yīng)的比例增益分別為0.5/0.25/0.167。
的形式一致,只是把調(diào)節(jié)閉環(huán)性能的參數(shù)從τ變成了λ。實(shí)際上λ反映了控制回路的期望閉環(huán)時(shí)間常數(shù)。λ越大控制回路的閉環(huán)響應(yīng)速度越慢,λ越小控制回路的閉環(huán)響應(yīng)速度越快。對(duì)基準(zhǔn)自衡對(duì)象使用λ=0/τ/2=τ0s/3s/6s,對(duì)應(yīng)的比例增益分別為0.5/0.25/0.167。從圖1的設(shè)定值階躍響應(yīng)曲線和前面的分析可以看到:λ=τ時(shí)過(guò)程變量設(shè)定值階躍響應(yīng)曲線有超調(diào)無(wú)振蕩,是最優(yōu)閉環(huán)響應(yīng);λ變小,設(shè)定值階躍響應(yīng)曲線就會(huì)超調(diào)加大甚至振蕩;如果λ=2τ,設(shè)定值階躍響應(yīng)就比較緩慢。λ的正確選擇應(yīng)該是基于純滯后時(shí)間而不是時(shí)間常數(shù)。也有資料說(shuō)λ的選擇是基于時(shí)間常數(shù),這也是一個(gè)錯(cuò)誤的傳言。推薦λ≥τ。當(dāng)λ≥τ后,λ基本上與閉環(huán)系統(tǒng)的時(shí)間常數(shù)相當(dāng)。
自衡對(duì)象不同λ的設(shè)定值階躍響應(yīng)")
圖1 基準(zhǔn)自衡對(duì)象不同λ的設(shè)定值階躍響應(yīng)
自衡對(duì)象的Lambda整定方法可以歸納為:微分不用、積分固定、比例可調(diào)。
自衡對(duì)象控制模型計(jì)算
在Lambda整定方法確定后,計(jì)算PID參數(shù)的公式就確定下來(lái)了。現(xiàn)在自衡對(duì)象PID參數(shù)整定的難點(diǎn)就轉(zhuǎn)移到如何獲取被控對(duì)象的控制模型和如何確定合理的λ上。
對(duì)于自衡對(duì)象而言,模型增益無(wú)論使用開(kāi)環(huán)測(cè)試還是閉環(huán)測(cè)試,其計(jì)算公式都一樣:

要注意模型增益計(jì)算數(shù)據(jù)可能受到干擾的影響,建議多次測(cè)試并選擇大的模型增益進(jìn)行PID控制器參數(shù)計(jì)算。
象的控制模型示意圖")
圖1 一階純滯后自衡對(duì)象的控制模型示意圖
所謂的自衡對(duì)象響應(yīng)曲線,指的是在自衡被控對(duì)象處于穩(wěn)態(tài)時(shí)對(duì)控制器輸出做階躍變化后的響應(yīng)曲線。自衡對(duì)象特性計(jì)算需要知道4個(gè)參數(shù)△OP、△PV、τ和T。穩(wěn)態(tài)的△OP和△PV可以在響應(yīng)曲線中很容易獲得。63.2%△PV對(duì)應(yīng)的時(shí)間為τ+T的時(shí)間終點(diǎn),τ+T的時(shí)間起點(diǎn)為控制器輸出開(kāi)始階躍變化的時(shí)間。要在這兩個(gè)時(shí)間中間取一個(gè)分割點(diǎn),從控制器輸出開(kāi)始階躍變化的起點(diǎn)到這個(gè)分割點(diǎn)的時(shí)間段為純滯后時(shí)間τ,從這個(gè)分割點(diǎn)到τ+T的時(shí)間終點(diǎn)的時(shí)間段為時(shí)間常數(shù)T。
通過(guò)上面的分析,我們可以把自衡對(duì)象基于響應(yīng)曲線的控制模型的重點(diǎn)放在:如何對(duì)從[ID輸出開(kāi)始階躍變化的起點(diǎn)到τ+T的時(shí)間終點(diǎn)這段時(shí)間進(jìn)行分割。最直觀準(zhǔn)確地確定純滯后時(shí)間τ和時(shí)間常數(shù)T的分割點(diǎn)的方法是切線法。從響應(yīng)曲線第一次到達(dá)63.2%△PV的位置,沿響應(yīng)曲線向開(kāi)始位置的橫坐標(biāo)軸同時(shí)向開(kāi)始方向做響應(yīng)曲線的切線或交線,切線或交線與開(kāi)始位置的坐標(biāo)橫軸相交。輸出變化到交點(diǎn)為純滯后時(shí)間τ,交點(diǎn)到63.2%△PV的時(shí)間為時(shí)間常數(shù)T。
一階純滯后、多容純滯后、反向過(guò)程的自衡對(duì)象的控制模型的選取原則分別見(jiàn)圖1、圖2和圖3。這種基于響應(yīng)曲線獲取控制模型的方法是將Lambda整定方法工程化的很重要的創(chuàng)造性工作。
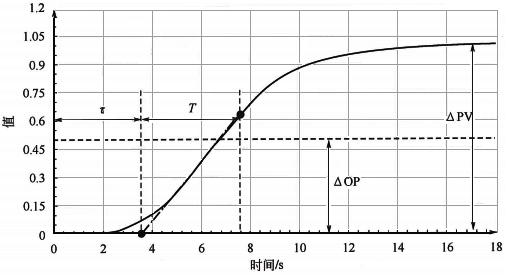
圖2 多容純滯后自衡對(duì)象的控制模型示意圖
象的控制模型示意圖")
圖3 反向自衡對(duì)象的控制模型示意圖
相關(guān)閱讀
◆自衡對(duì)象和非自衡對(duì)象的Lambda整定